Roboti na Ampéru 2014
Nové zájemce o účast v Robosoutěži 2014 a studium programu Kybernetika a robotika se snažili získat Martin Hlinovský a Katka Jandová na stánku vydavatelství FCC Public v pavilonu P. Michal Sojka v rámci konference Perspektivy automatizace - Zabezpečení dat v integrované průmyslové výrobě promluvil na téma Safety versus Security (klasická bezpečnost versus kybernetická) - projekt SESAMO.
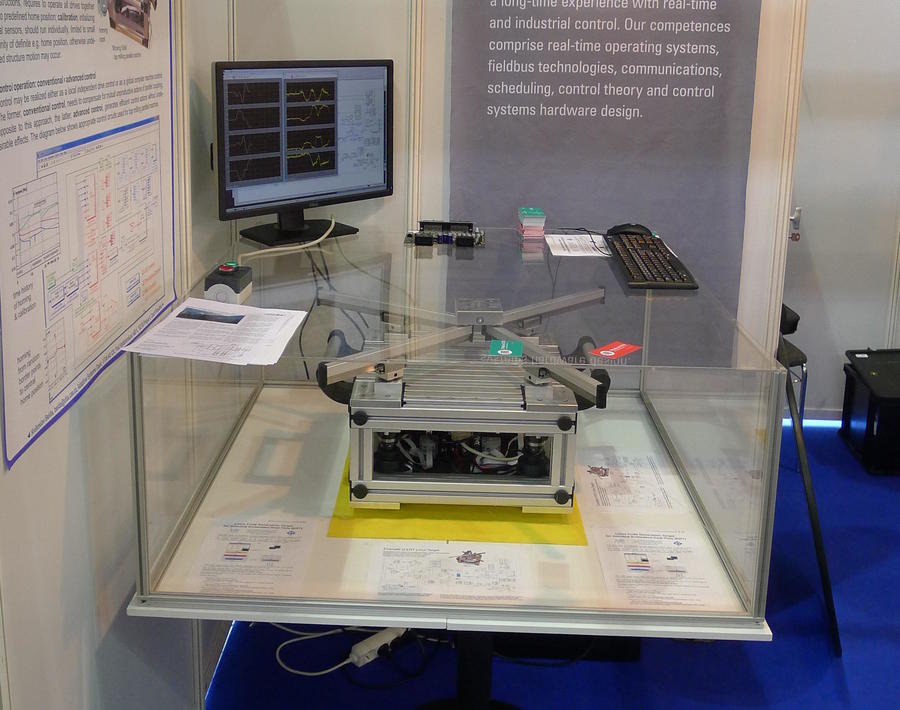
Souběžně na stánku FEL v pavilonu V prezentoval Pavel Píša společně s Dr. Beldou z UTIA výsledeky jejich spolupráce v podobě paralelního manipulátoru, který je řízen pomocí Simulink Real-Time Targetu generujícím kód pro Linux" - Linux Target for Simulink Embedded Coder. Manipulátor je poháněn čtyřmi akčními členy (elektromotory), které jsou propojeny pomocí čtyř ramen s plošinou, na které se nachází pracovní bod. Pohyb v rovině odpovídá třem stupňům volnosti. Regulace proto musí na základě matemetického modelu eliminovat antagonistické síly vznikající při řízení přeurčené soustavy.