Our robots at Amper 2014 Fair
New potential students interested in participating in Robosoutěži 2014 and the study program Cybernetics and robotics had been attracted by Martin Hlinovský and Katka Jandová at the FCC Public Publishing booth in Hall P. Michal Sojka spoke on the topic of Safety versus Security (classical safety vs. cybersecurity) - SESAMO project at the conference Perspectives automation - integrated Data security in industrial production.
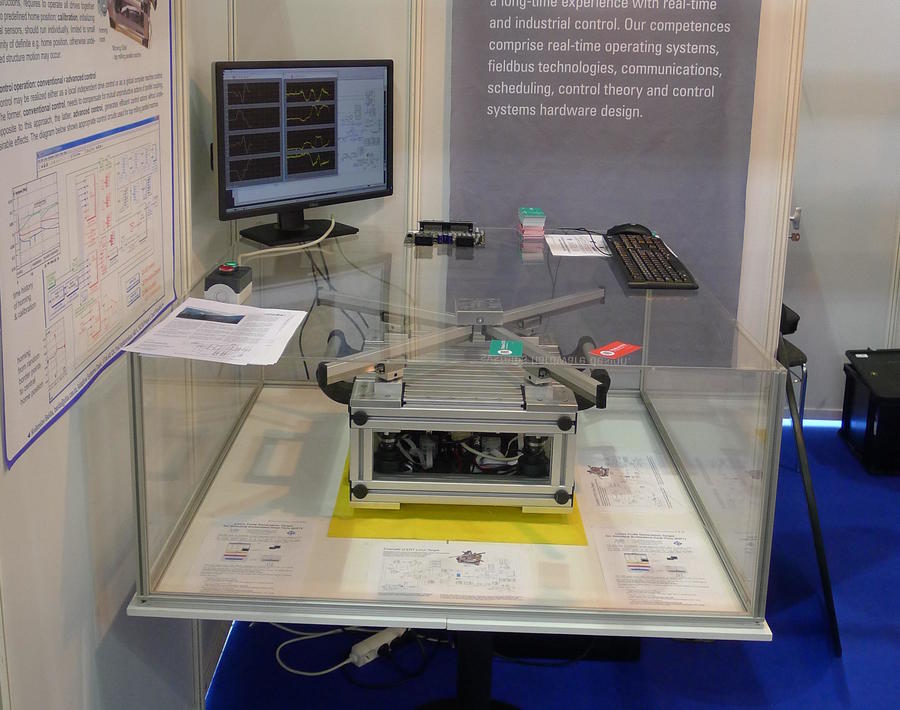
In parallel to this presented Pavel Pisa together with Dr. Belda from UTIA at the FEL stand in Hall V results of their cooperation in the form of parallel manipulator, which is controlled by Simulink Real -Time Target generating code for Linux " - Linux Target for Simulink Embedded Coder. Manipulator is driven by four actuators (electric motors ), which are interconnected by four arms to the platform where is placed operating point. Movement in a plane corresponding only to three degrees of freedom. Thus regulation based on the mathematical model must be able to eliminate antagonistic forces generated during steering overdetermined system.